
Arduino: léptetőmotor működtetése - hogyan működik
A léptetőmotor nem fordul el feszültség alkalmazásakor, hanem kis lépéseket tesz. Az Arduino-val könnyedén vezérelheti egy ilyen motort. Ebben a gyakorlati tippben megtudhatja, hogyan lehet ezt megtenni.
Arduino: léptetőmotor működtetése - hogyan működik
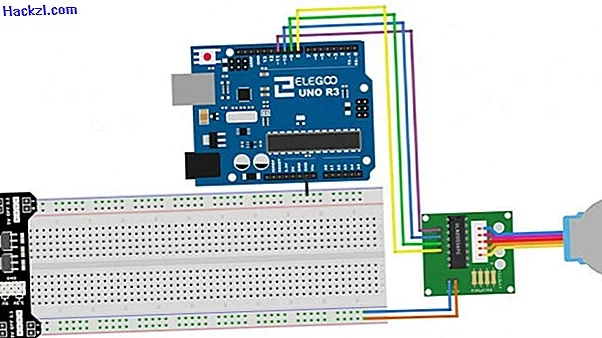
A léptetőmotor egy elektromechanikus eszköz, amely az elektromos impulzusokat diszkrét mechanikai mozgássá alakítja. Egy ilyen léptetőmotor vezérléséhez az Arduino-val lépcsõmotoros vezetõlapra van szükség. Csatlakoztassa az összes alkatrészt a képen látható módon.
- Ezután a "#include" paranccsal importálnia kell a szükséges könyvtárat.
- A "const int stepsPerRevolution = 1500;" paranccsal meghatározza, hogy hány lépést kell a motornak megtennie egy fordulaton belül.
- Attól függően, hogy miként csatlakoztatta a lépcsőfokot, új léptetőobjektumot kell létrehoznia. Ezt megteheti a "Stepper myStepper (stepsPerRevolution, 8, 10, 9, 11) paranccsal".
- Most állítsa be a sebességet a beállítási módszerben: "myStepper.setSpeed (20);".
- Most használhatja a "myStepper.step (stepsPerRevolution);" mondjuk, hogy ennek teljes fordulatot kell tennie az óramutató járásával megegyező irányban.
A következő cikkben elmagyarázzuk, hogyan állítsunk be egy GSM modult az Arduino-n.